

新闻中心





智能微交通中桁架式机器人的设计与应用研究
发布时间:2022-06-09
浏览次数:223
智能工厂是当今时代科技力量的重要体现,其中的物料运输可以实现从原料入库到产品出库的整体流水化作业,它是当前社会工业发展的研究重点所在。智能工厂中的物料调度可以视为智能微交通,而桁架式机器人是智能微交通中重要的一环,它结合了自动控制技术和芯片技术等先进技术,针对于智能微交通中的桁架式机器人设计,论文主要从以下几个方面展开研究。
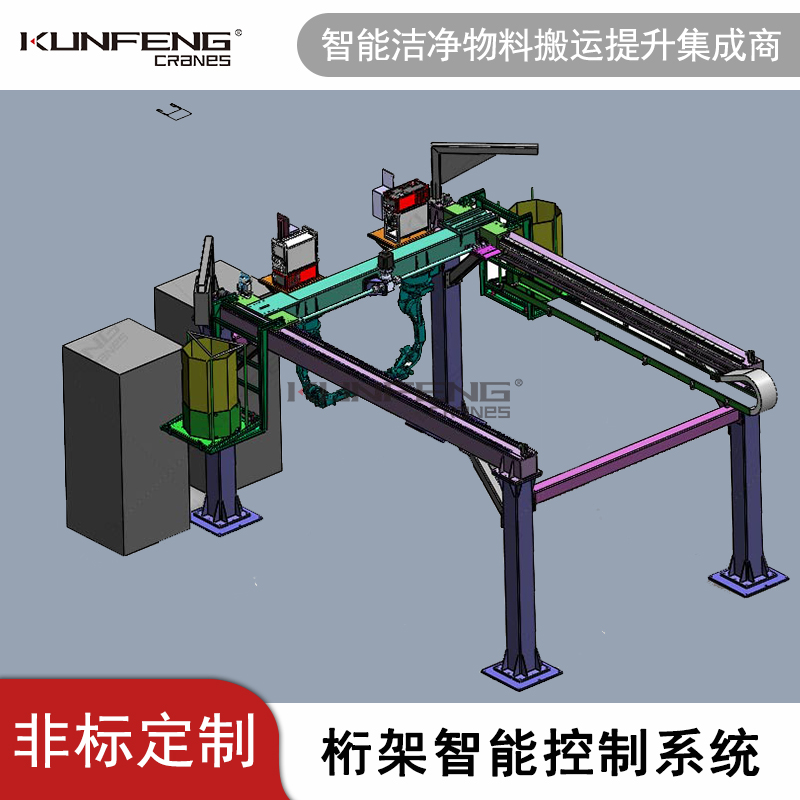
首先对桁架式机器人进行了介绍,阐述了课题研究的背景和意义,并对于智能工厂和智能微交通的国内外发展情况和工业机器人技术进行了描述分析和对比。对本课题中桁架式机器人进行了整体设计,介绍了桁架式机器人的空间结构,选择空间直角坐标型桁架式设计来完成桁架式机器人的空间运动;对整个桁架式机器人的运动部件进行了比较和选择,分析了桁架式机器人中应用较多的几种不同类型的末端执行器结构和特点,介绍了桁架式机器人的安全防护方法和润滑措施。分析和选择桁架式机器人的控制模块,通过使用交流伺服电机作为桁架式机器人的运动执行系统,选择使用嵌入式芯片作为整个桁架式机器人的控制核心,从而实现对整体的运动、警报和信息交互的控制。设计了与上位机传递运行参数和命令的人机交互界面。
针对于智能工厂中经常用到柔性连接末端提出利用数字滤波法来稳定滤波的设计方法。分析了桁架式机器人在智能工厂中的运动模型和运动过程,需要桁架式机器人具有一定的路径规划能力。介绍了 A*算法和RRT算法,并将A*算法中的启发式因素应用到了 RRT算法中,更加智能选择和实现桁架式机器人的路径运动,帮助实现智能工厂中的微交通。另外通过模拟MATLAB仿真与原始算法进行对比,表明改进之后的算法对于桁架式机器人路径规划有了一定优化效果。通过对该课题设计的桁架式机器人进行实际工厂中的测试与应用,以及对设计的路径规划方法的模拟和仿真,表明设计的桁架式机器人可以实现对于智能微交通中要求的物料运输。综合而言,本课题对于桁架式机器人的设计以及其在智能微交通中应用和实践有一定的参考价值和应用前景。
来源:
上一篇:
一款新型洁净起重机关键技术
下一篇:
机场托运车车架专用翻转机设计















